Definitions of semaphores
There are several different definitions of the semaphore type and it is important to be able to distinguish between them. The differences have to do with the specification of liveness properties; they do not affect the safety properties that follow from the semaphore invariants, so the solution we gave for the critical-section problem satisfies the mutual exclusion requirement whatever definition we use.
Strong semaphores
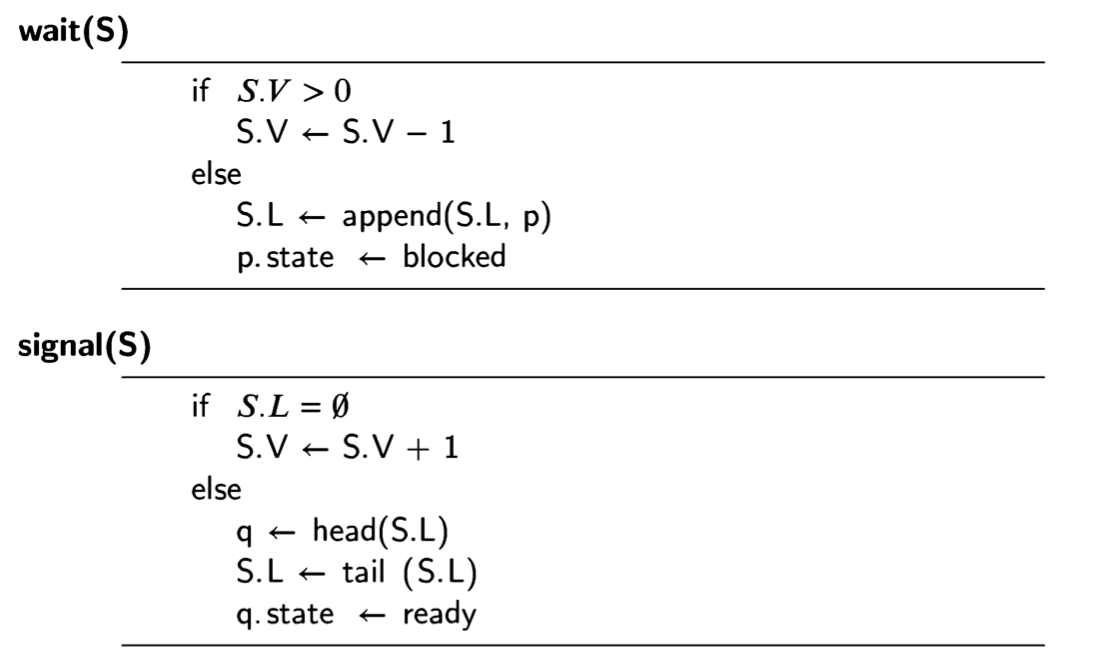
The semaphore we defined is called a weak semaphore and can be compared with a strong semaphore. The difference is that S.L, the set of processes blocked on the semaphore S, is replaced by a queue:
Recall (page 114) that we gave a scenario showing that starvation is possible in the solution for the critical section problem with more than two processes. For a strong semaphore, starvation is impossible for any number N of processes. Suppose p is blocked on S, that is, p appears in the queue S.L. There are at most \(N - 1\) processes in S.L, so there are at most \(N - 2\) processes ahead of p on the queue. After at most \(N - 2\) signal(S) operations, p will be at the head of the queue S.L so it will unblocked by the next signal(S) operation.
Busy-wait semaphores
A busy-wait semaphore does not have a component S.L, so we will identify S with S.V. The operations are defined as follows:
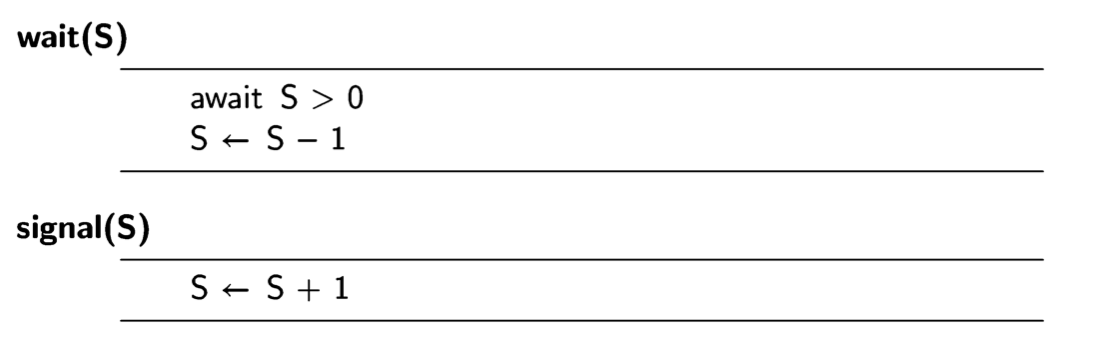
Semaphore operations are atomic so there is no interleaving between the two statements implementing the wait(S) operation.
With busy-wait semaphores you cannot ensure that a process enters its critical section even in the two-process solution, as shown by the following scenario:
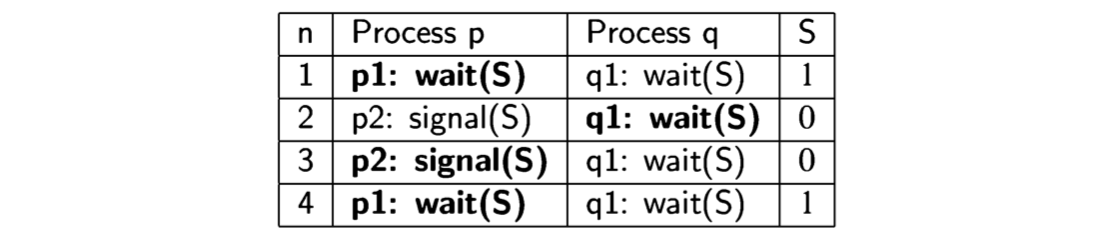
Line 4 is identical to line 1 so these states can repeat indefinitely. The scenario is fair, in the technical sense of Section 2.7, because process q is selected infinitely often in the interleaving, but because it is always selected when S = 0, it never gets a chance to successfully complete the wait(S) operation.
Busy-wait semaphores are appropriate in a multiprocessor system where the waiting process has its own processor and is not wasting CPU time that could be used for other computation. They would also be appropriate in a system with little contention so that the waiting process would not waste too much CPU time.
Abstract definitions of semaphores
The definitions given above are intended to be behavioral and not to specify data structures for implementation. The set of the weak semaphore is a mathematical entity and is only intended to mean that the unblocked process is chosen arbitrarily. The queue of the strong semaphore is intended to mean that processes are unblocked in the order they were blocked (although it can be difficult to specify what order means in a concurrent system [37]). A busy-wait semaphore simply allows interleaving of other processes between the signal and the unblocking of a blocked process. How these three behaviors are implemented is unimportant.
It is possible to give abstract definitions of strongly fair and weakly fair sema- phores, similar to the definitions of scheduling fairness given in Section 2.7 (see [58, Section 10.1]). However, these definitions are not very useful, and any real implementation will almost certainly provide one of the behaviors we have given.